
3-D representation of the landing approach of Libellula depressa in a study of navigation mechanisms in natural surroundings
A. Döhrn1, M.A. Pabst2 and K Kral3
1Institute of Zoology/Neurobiology D., University of Graz, Graz, Austria
2Institute of Histology & Embryology, Graz, Austria
3Institute of Zoology, Graz, Austria
Introduction
As a swift flyer and an extremely successful hunter [1], the dragonfly requires high-performance eyes for visual orientation in space. Environmental structures must be detected and information concerning them processed at lightning speed to make it possible for appropriate flight manoeuvres, such as landing on a preferred perch, to be initiated at the right time. In such acts of precision navigation, image expansion, retinal image displacement through translational movement, and binocular target fixation could all represent optical stimuli that trigger specific landing reactions. Systems that analyse such motion information and image expansion could, as components of an autopilot, serve to correct course deviations and prevent collisions [2].
Rather than investigating the neuronal background of this highly complex system, this project examines the structure of the eye as a stimulus detector, together with the stimulus patterns involved in triggering specific components of the landing approach under conditions close to those found in nature.
Materials and Methods
Libellula depressa was chosen for the experiments. The male of this dragonfly
is particularly suitable for such studies, due to its bright blue coloration
and perching hunting strategy. An artificial perch was placed near a garden
pond, and insulation tape was used to mark the perch at defined intervals to
provide a scale (Figure 1). Two analogue video cameras, positioned 2 m from
the perch and oriented at 90° to one another, were used to record the last 50
cm of each landing approach. External time codes were also recorded by both
cameras. A special program was developed for the analysis (see Figure 2), which
made it possible to extract three-dimensional landing data from the two-dimensional
data provided by the two cameras. The output of this Borland Delphi program
consists of CSV files, which can be processed by any current spreadsheet program.
Figure 1. Libellula depressa approaching the target.
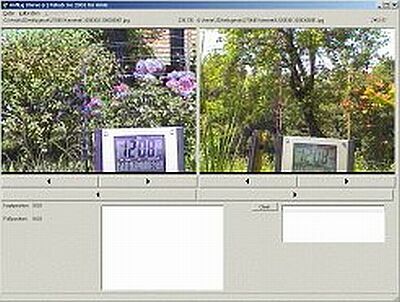
Figure 2. Computer program interface.
With the aid of these data, angles can be calculated which, in conjunction with optical and morphological parameters (monocular and binocular visual field, interommatidial angle, facet size and interocular distance) make it possible to reconstruct the image flow of the perch in the eye of Libellula depressa during the last 50 cm of the landing approach (Figure 3).
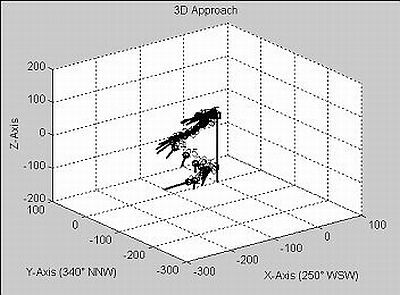
Figure 3. Landing data, plotted in MATLAB.
Supported by research grants from the Austrian Science Foundation (Grant No. P14697-Bio to K.K.).
References
Paper presented at Measuring Behavior 2002 , 4th International Conference on Methods and Techniques in Behavioral Research, 27-30 August 2002, Amsterdam, The Netherlands